
Se le dió solución al siguiente problema planteado

Elementos:
- 1 PSOc
- 2 protoboards
- 1 dip switch de 1 posición
- 2 pulsadores
- 4 7segmentos
Planteamos el problema a partir de manejar un contador de 0 a 9999 como medida de profundidad y tomando una frecuencia de 730Hz debido a que la velocidad del pulso en el agua es de 1460Hz pero teniendo en cuenta que el tiempo es de ida choca hasta el fondo y regresa al barco, para lo cual utilizamos este componente que es un contador BCD programable con reset y en este caso se limitó de 0 a 9 , se utilizaron 4 de estos componentes para cada uno de los dígitos referentes a la profundidad.
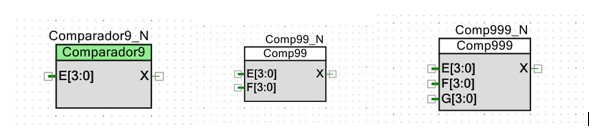
Se activaron cada uno de los contadores con estos comparadores de 9, 99 y 999 con el fin que al obtener este número se activara el contador siguiente de manera que el clock con la frecuencia de 730Hz solo activaba el primer contador con el digito de menor valor .
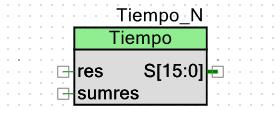
Creamos el componente de tiempo el cual tiene como función llevar los segundos y décimas de segundo que tarda el pulso en ir y volver al barco, el cual internamente estaba compuesto por:
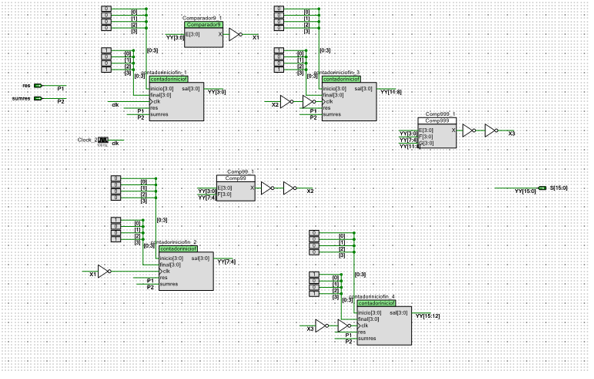
Como es notable también se usaron cuatro contadores programables BCD y los 3 compradores de 9, 99 y 999 con una conexión idéntica a la realizada en el sistema de profundidad con la variación que en este caso el digito de menor valor tienen el clock de 100Hz por lo cual este se toma como centésimas de segundo y con el comparador de 9 se activa el segundo display que hace referencia a las décimas de segundo, de igual manera con el comparador de 99 se activa el tercer display se activan los segundo y por consiguiente con el comparador de 999 se activa el cuarto display que muestra una segunda cifra de los segundos.
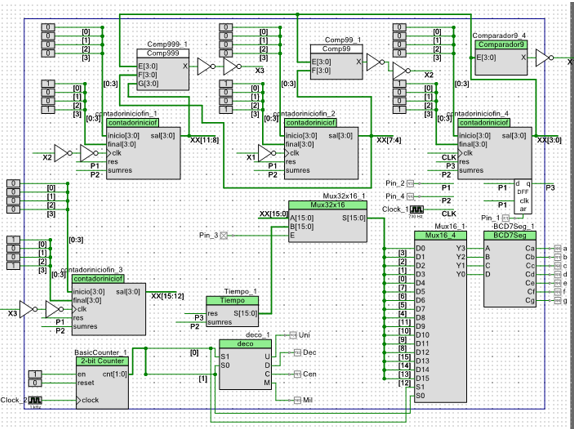
Podemos ver en esta imagen el diseño completo con los componentes anteriormente mencionados además de los componentes necesarios para manejar la visualización dinámica como lo son los MUX de 32-16 y 16-4, el Basic Counter, deco y BCD7 segmentos, por otra parte aclaramos que el pin2 tiene como función activar el conteo tanto de profundidad como de tiempo y de manera opuesta el pin4 detiene tanto el conteo de profundidad como de tiempo, ya que se mencionaba en el enunciado del problema estos eran dos sensores que se simulaban con dos pulsadores para el inicio y el fin del conteo de profundidad y tiempo, para finalizar la funcionalidad del pin3 es activar la salida del MUX de 32-16 con el fin de que muestre en un momento el tiempo y en el siguiente la profundidad obtenida en ese tiempo como se puede ver en el esquema mostrado anteriormente.
